
スポンサードサーチ
参考サイト
https://qiita.com/rkoyama1623/items/de467c6b954a6df638c8
スポンサードサーチ
GUI設定
まずサイトに沿って下記のコマンド実行
# Xサーバー通信用のアプリ群を入れる
sudo apt update
sudo apt install x11-apps -y
# 環境変数を設定する
## rvizがXサーバーと正しく通信できるようにする
echo 'export LIBGL_ALWAYS_INDIRECT=""' >> ~/.bashrc
## GazeboがXサーバーと正しく通信できるようにする
echo 'export GAZEBO_IP=127.0.0.1' >> ~/.bashrc
source ~/.bashrc ここでよくわかっていないが、設定は自分の場合は下記のようにすることでGUIが表示された。

スポンサードサーチ
ROSの設定
melodic (Ubuntu18.04 は下記のサイトを参考にすること)
http://wiki.ros.org/melodic/Installation/Ubuntu
ここに関しては上から下に沿ってやっていけばよいかと
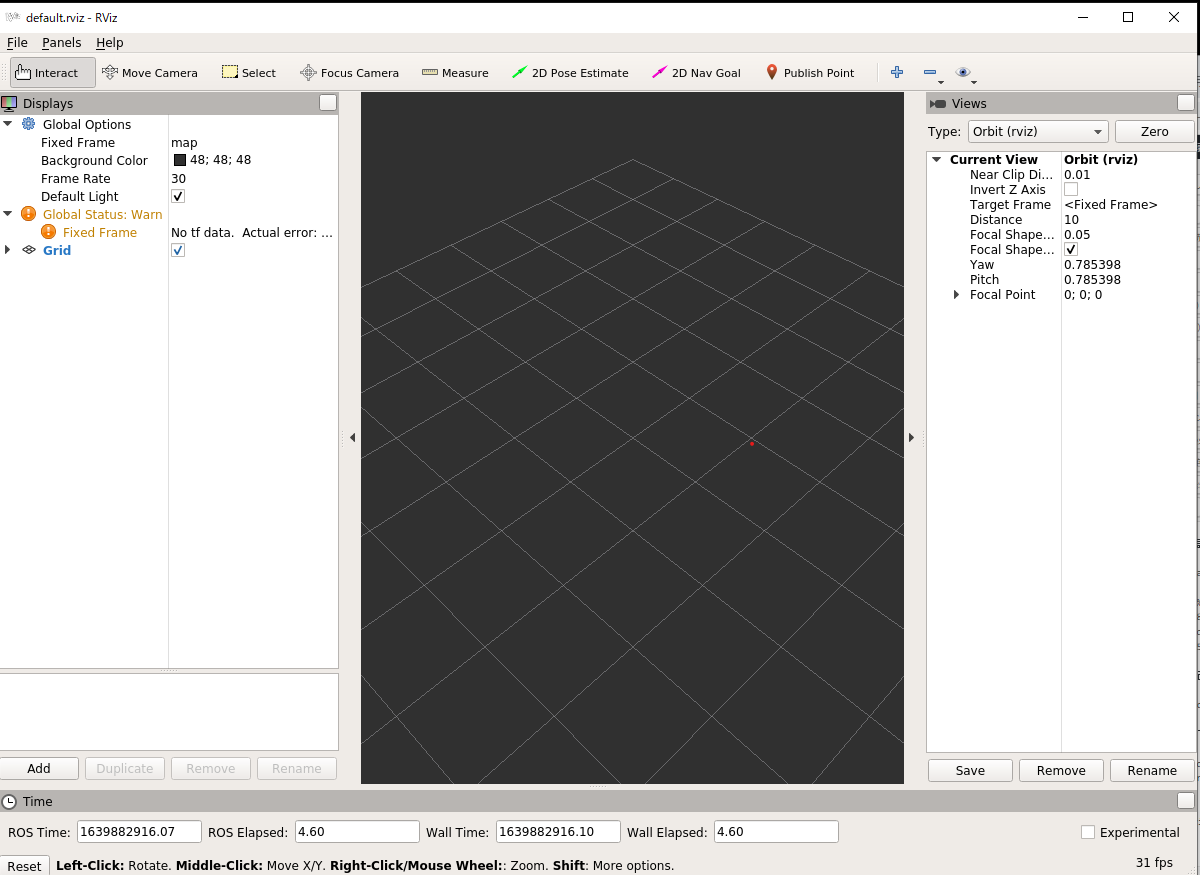
上記のコマンド打ち込んで、rvizが出てくればオッケーです。
コメントを残す